
Visualization
Visualization is the thousand words generated by one picture, image or animation in a web browser. Even though they can be challenging to understand and program, algorithms were chosen to facilitate the meaning and beauty of visualization. The visualization of algorithms in a browser should give the learner or the curious an appreciation of the beauty of the algorithm’s code as visualized in a browser. The visualization of algorithms in a web browser introduce programing challenges. The challenges require the interfacing or calling of various computer languages to build the model of the visualized algorithm data to be displayed and run in the web browser. The complexity of the high level programing code is reduced to HTML mark-up to display in simple browsers.
Algorithms
An algorithm is a well defined computer program that takes a value or set of values as input and produces an expected output related to the input. The algorithm transforms the input to the expected output of the given input. Algorithms are tools for solving well defined computational problems. The statement of the problems defines the algorithm’s transformational relationship between input and output. For example the statement, An algorithm to sort takes as …
Input: a sequence of n numbers (a1, a2, …, an) to produce a sorted sequence with …
Output: (a’1, a’2, …. a’n) such that a’1 <= a'2 <= … <= a'n.
An algorithm is said to be correct if for all input the algorithm halt with the correct output. However, there are incorrect algorithms that can be useful. The algorithms presented here are correct algorithms.
Any Pair of Segments Intersect
An algorithm for determining whether any two line segments in a set of segments intersect. The algorithm uses a technique called sweeping. In sweeping, an imaginary vertical line passes through the given set of geometric objects from left to right. The geometric object in this case are line segments. The sweeping line moves in the x-direction as a dimension of time. The sweeping line orders the line segments by placing them in a dynamic data structure to compare the segments relationships. As the the sweeping line moves from left to right, the sweeping line considers the endpoint of the line segments determines if segments intersect.
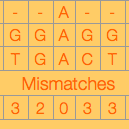
Align Three Sequences
An algorithm to compare similarities. For biological applications the algorithm would compare the DNA of two (or more) different organisms. One reason to compare strands of DNA is to determine how “similar” the strands are, as some measure of how closely related the organisms are. Similarity can be defined in different way. For example, if strands of DNA are substrings of other strands. Similarity in this case is if the number of changes needed to turn DNA strands into the other strands is small, then the organism are similar. Align Three Sequences is a three “string/strand” version of Longest common subsequence.
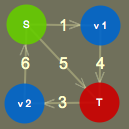
Maximum Flow
An algorithm to compute the greatest rate at which “materials” flow through a “system” from a source to sink without violating any capacity constraints. Materials and systems utilizing a Maximum Flow algorithm include liquids flowing through pipes, parts on an assembly line, current through electrical networks, and information through a network. The Ford-Fulkerson method is used to solve the Maximum Flow algorithm. The three important ideas of the Ford-Fulkerson that transcend he method and are relevant to many flow algorithms and problems: residual networks, augmenting paths, and cuts.

Protein Data Banks
An interface that allows users to select and view 3D structure of a biological macromolecule in a selected protein data bank. The Protein Data Bank (PDB) was established as the 1st open access digital data resource in all of biology and medicine. Through an internet information portal and downloadable data archive, the PDB provides access to 3D structure data for large biological molecules (proteins, DNA, and RNA). These are the molecules of life, found in all organisms on the planet. Knowing the 3D structure of a biological macromolecule is essential for understanding its role in human and animal health and disease, its function in plants and food and energy production, and its importance to other topics related to global prosperity and sustainability.

Disk Visualizer
The Disk Visualizer is a simple interface for making disk images. The user is able to locate he disc on the canvas using X, Y coordinates. The user also inputs the SIZE or radius of the disk. A RGB color is selected. Various filters are applied to the disc: cubic, gaussian, hat, quad and tent. Finally a weighting factor is added. Multiple disc can be added to the palette as illustrated in the accompanying image. The disc(s) maybe viewed in various file formats: Static GIF, Animated GIF, AVI, FLASH, MOV and MPG. First, check-out the Demos. Then move over to CREATE. View the disc with the default settings. Make multiple disc by checking KEEP. Select various file formats to view the disc image. Have fun!

AtomTV
An interface to view the archive of experimentally determined three dimensional structures of biological macromolecules that from the Protein Data Banks which serves the community of researchers, educators and students. ATOMTV allows the user to view and rotate various proteins from selectable protein data banks. There is an download option to download a particular PDB file and view the molecule in the viewer of ATOMTV.

AIT
Cloud
AITCloud is a suite of client-server software for creating and using file hosting services. It is enterprise-ready with comprehensive support options. Free and open-source means that anyone is allowed to install and operate it on their own private server devices. Files are stored in conventional directory structures, accessible via WebDAV if necessary. User files are encrypted during transit and optionally at rest. AITCloud can synchronise with local clients running Windows, macOS, or various Linux distributions. AITCloud permits user and group administration. Content can be shared by defining granular read/write permissions between users and groups. Alternatively, users can create public URLs when sharing files.

Surveillance
Surveillance is a software application for monitoring via closed-circuit television. Control is via a web-based interface. The application can use standard cameras or IP-based camera devices. Surveillance supports multiple cameras, reviewable simultaneously. Recording starts when the application detects changes between camera frames; one can select zones within field of view that the software will ignore. Surveillance supports cameras compatible with ONVIF standard.

Fish Camera
A surveillance camera from the camera server is pointing at a livefish tank. Different cameras types are tested. The images are live feeds from my camera server: Fish Cam is a small peep-hole camera rigged-up to my office aquarium. Note: There are times when maintenance is in order. During those times, displayed will be a blue or black blank screen. After about an hour the fish can surveilled.
Bird Camera
A surveillance camera from the camera server is pointing at a Humming Bird feeder. Different cameras types are tested. The images are live feeds from my camera server: Bird Cam is a small dome camera with Night-time vision. It is pointed at the humming bird feeder outside Allen Integrated Technologies (AIT). [ Note: There are times when maintenance is in order. During those times, displayed will be a blue | black blank screen. After about an hour you can surveil the fish or the humming birds. Also, the humming birds will return during the Spring. Until then the humming bird cam displays the blue blank screen. ]
Autonomous Robots
Autonomous robot are mobile robot that move unsupervised through real-world environments to fulfill its tasks. Fundamental to the study and application of autonomous robots is kinematics: The understanding of the mechanical behavior of the robot both in order to design appropriate mobile robots for tasks and to create control software for an instance of mobile robot hardware. A Braitenberg vehicle is an autonomous robot that can autonomously move around based on its sensor inputs.This Braitenberg Vehicle is called the Deliberate Explorer. The Deliberate Explorer turns slowly turn from beacons. Imagine the Deliberate Explorer is scanning planets for signs of life! After exploring, it speeds away to the next planetary galaxy. … or beacon. Anyway there is a trace of the Deliberate Explorer: